近日,杭州市北京航空航天大学国际创新研究院(北京航空航天大学国际创新学院)医工交叉科创中心副研究员余龙腾博士与华中科技大学工程力学系刘大彪教授在JCR Q1、测量领域顶级期刊《Measurement》上合作发表题为“Soft microtubular sensors as artificial fingerprints for incipient slip detection”的研究论文。本文报道了一种仿生触觉手指,采用两个压阻式微软管传感器作为仿生指纹,用于初始滑移的有效检测。该研究得到国家自然科学基金项目 12302248、12272146,以及浙江省自然科学基金项目LQ23F010015资助。余龙腾为论文第一作者,北航国新院医工交叉科创中心为第一完成单位。
原文链接:https://www.sciencedirect.com/science/article/pii/S0263224125010887
研究背景
初始滑移代表滑移的开始,表明稳定接触即将失效。在机器人抓取中,初始滑移的出现意味着抓取将要失败。因此,在复杂环境中操作精密或易变形物体时,初始滑移检测对于机器人至关重要。触觉传感器能够测量接触过程中的力、变形和温度等信息,赋予机器人初始滑移检测能力,提高其作业效率。然而,将触觉传感器集成到机器人仿生手指中仍面临诸多挑战,例如许多触觉传感器需要特殊材料或复杂工艺,从而结构复杂、体积庞大且调试困难。针对这些问题,本文报道了一种仿生触觉手指,采用微软管传感器作为仿生指纹,实现了简单有效的初始滑移检测。
研究成果
仿生触觉手指由三部分组成:刚性支架作为手指骨架,硅胶作为软组织,微软管传感器作为仿生指纹(图1)。其中,微软管传感器为注入液态金属的柔性可拉伸纤维。两根微软管传感器嵌在软体手指表面,在受到外力后将发生形变,从而产生电阻变化。
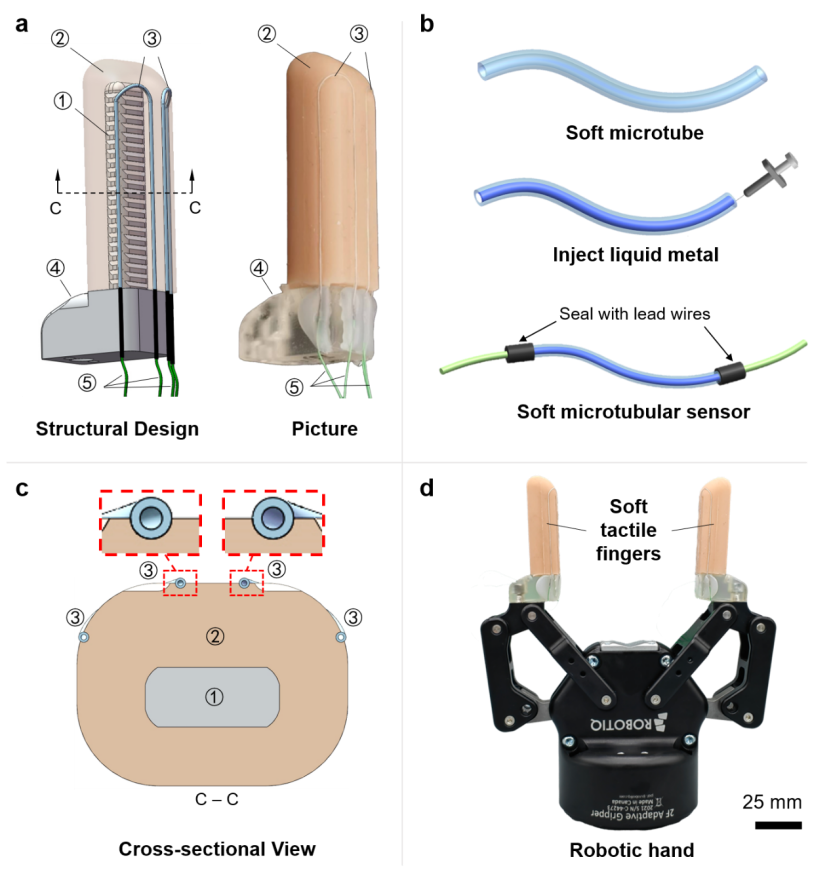
图1 仿生触觉手指
为了研究仿生触觉手指在检测初始滑移时的传感特性,研究团队定制了实验装置对光滑和粗糙两种接触表面进行传感特性测试(图2)。在该实验装置中,一个仿生触觉手指固定在滑块上方,滑块跟随导轨左右滑动。手指与滑块之间的作用力由滑块底部的三维力传感器记录。滑块分为两种,一种表面光滑,一种表面具有三角形截面纹理。
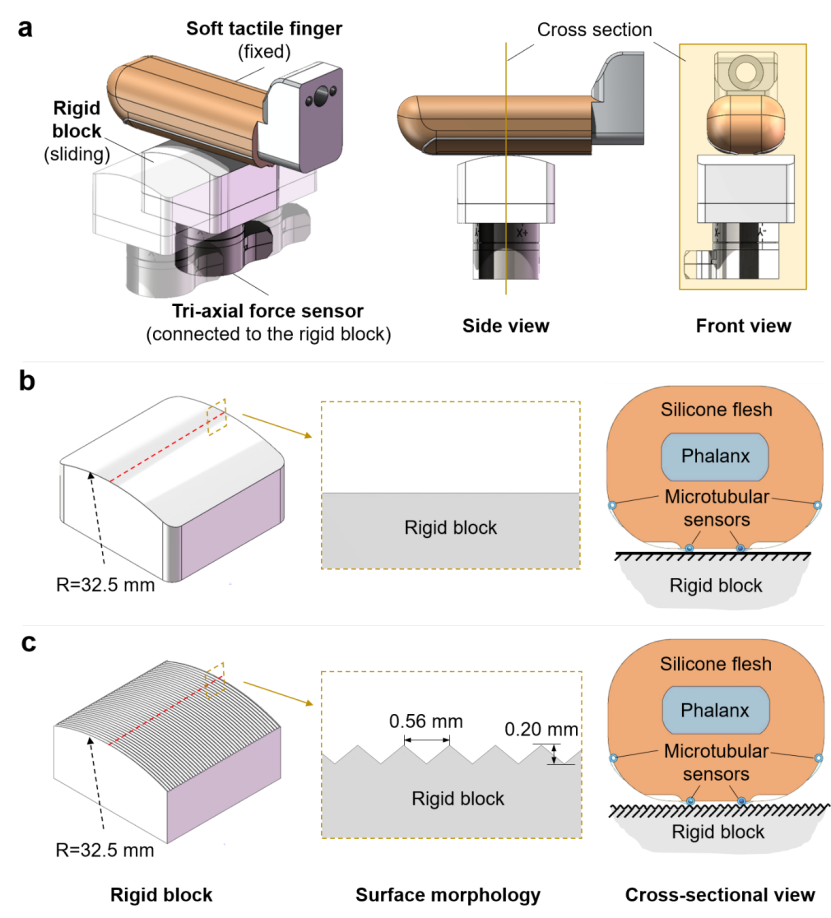
图2 实验装置以及两种滑块
实验结果表明,当接触表面光滑时,可以从电阻信号的变化模式中推断出滑移方向。然而,当接触表面粗糙时,无法从电阻信号的变化模式中推断滑移方向。此外,无论接触表面是否光滑,任何电阻信号中的初始峰值都代表了初始滑移的出现(图3和图4)。
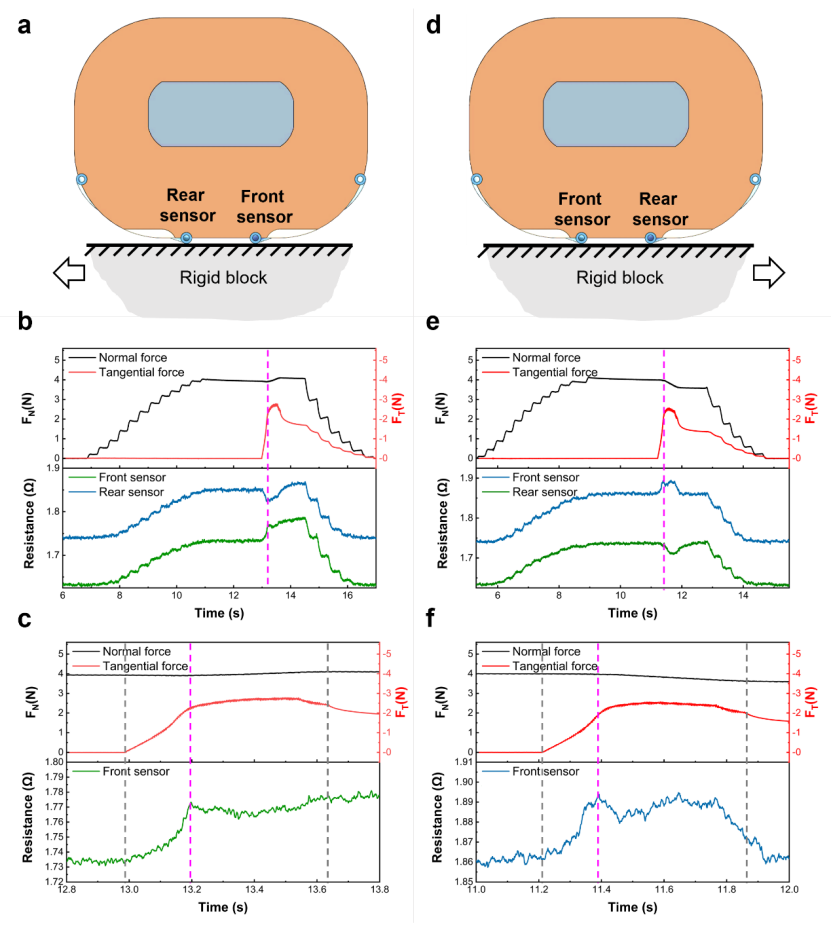
图3 在光滑表面滑动的实验结果
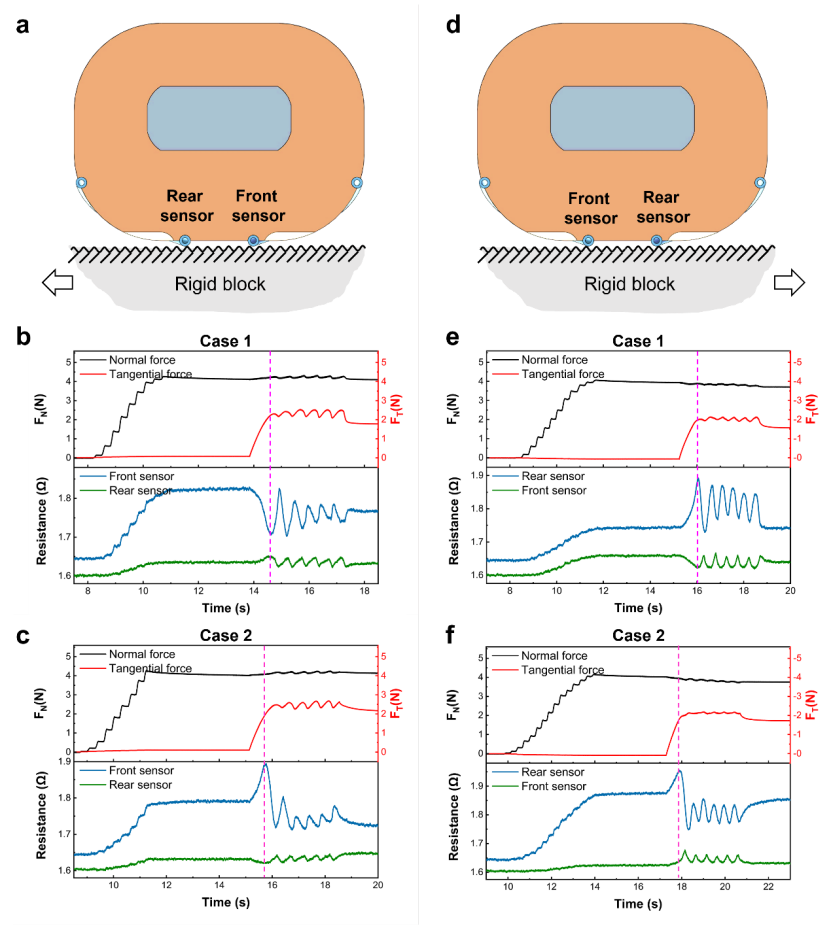
图4 在粗糙表面滑动的实验结果
为了研究以上实验现象的内在机制,研究团队在光滑和粗糙表面上开展了有限元仿真分析(图5和图6),较好地再现了实验现象,并给出合理解释。在光滑面上滑动时,两个传感器受力不对称,造成了二者电阻信号的差异。在粗糙面上滑动时,纹理突起划过两个传感器时造成了其各自电阻信号的波动。
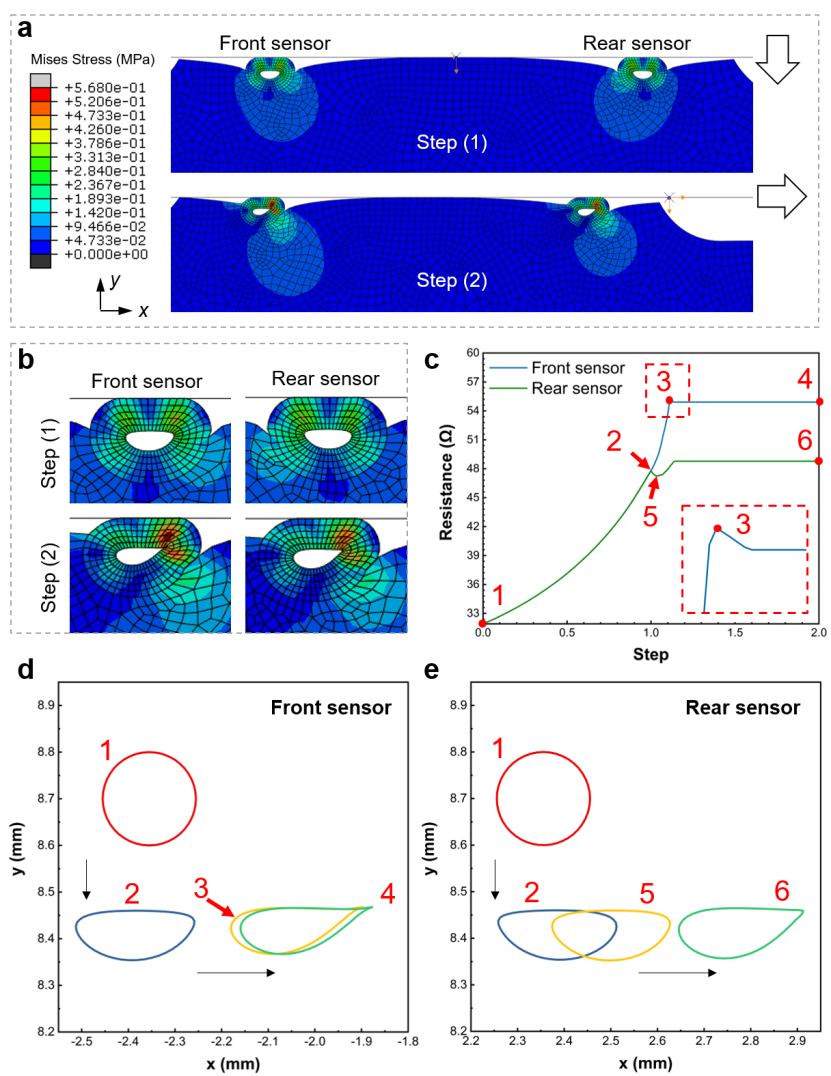
图5 在光滑表面上滑动的仿真结果
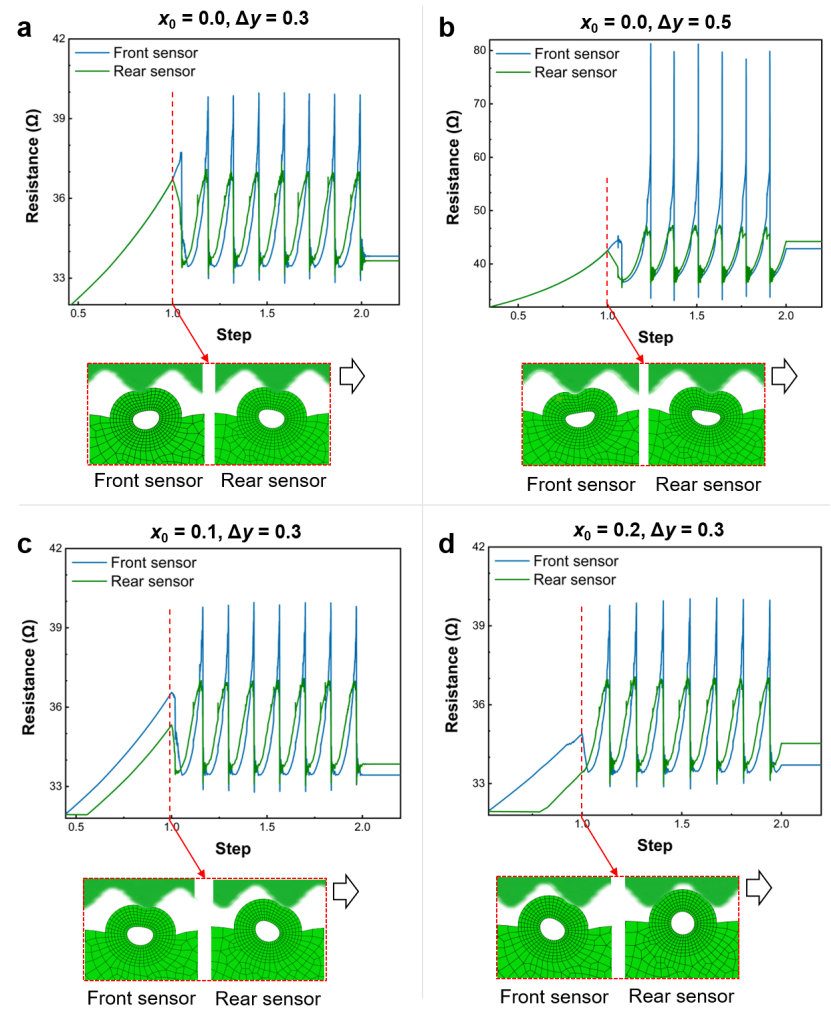
图6 在粗糙表面上滑移的仿真结果
以上分析表明,仿生触觉手指中任意传感器电阻信号的首个峰值代表了初始滑移。据此,研究团队基于峰值检测建立了初始滑移检测算法。为了验证本方法的有效性,研究团队将两个仿生触觉手指安装在一只机械手上,进行了自适应抓取实验(图7)。
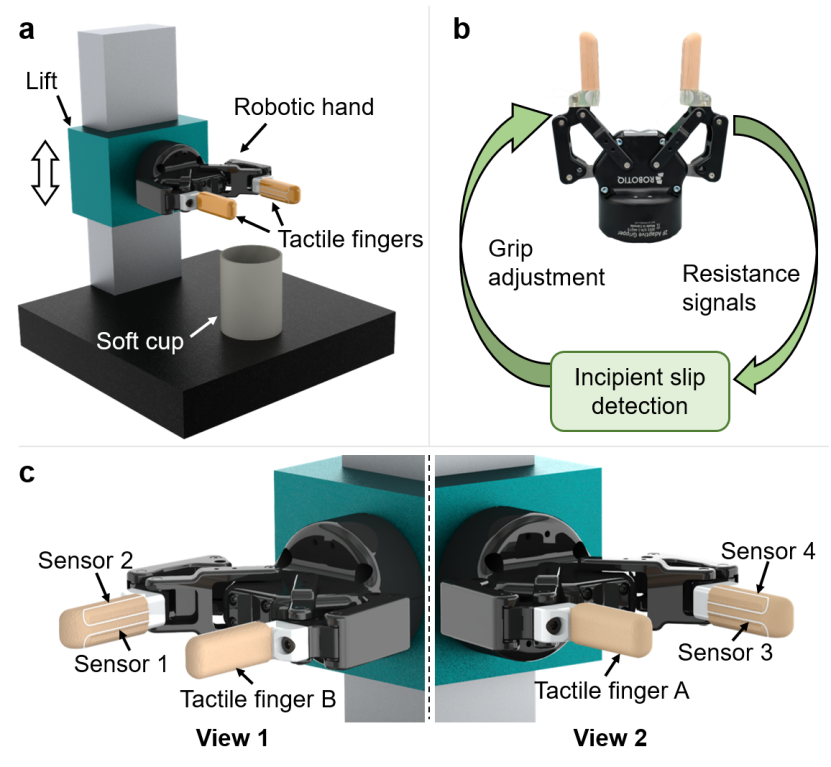
图7 自适应抓取实验装置
图8展示了该机械手对重量未知的可变形物体的自适应抓取。在该实验中,机械手尝试抓起一个软杯,杯中有未知重量的沙子。在抓取过程中,若出现初始滑移,机械手将略微抓紧,从而保证杯子被成功抓起。图9展示了该机械手对具有移动趋势的可变形物体的自适应抓取。在该实验中,机械手已抓起软杯,研究人员向杯中倒入沙子促使杯子向下滑动。机械手感受到初始滑移并不断抓紧,避免杯子掉落。以上演示实验表明了本文所提出的仿生触觉手指以及初始滑移检测方法的有效性。
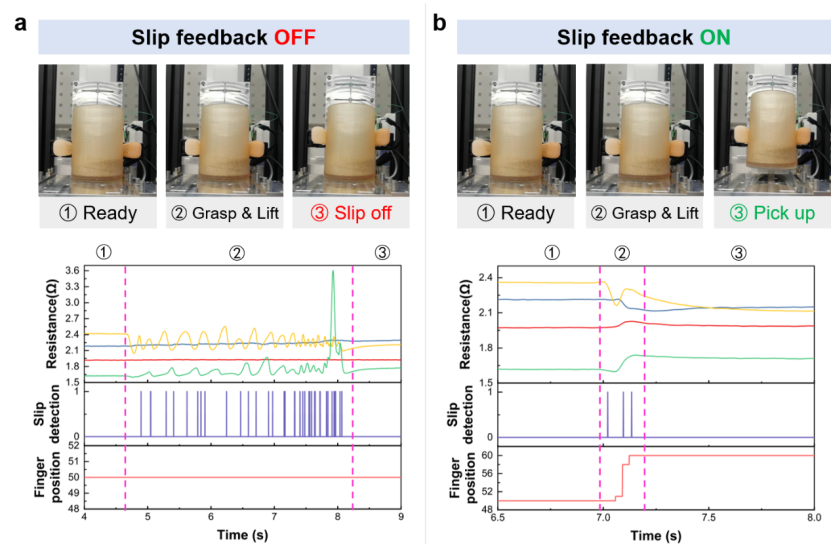
图8 自适应抓取重量未知的易变形物体
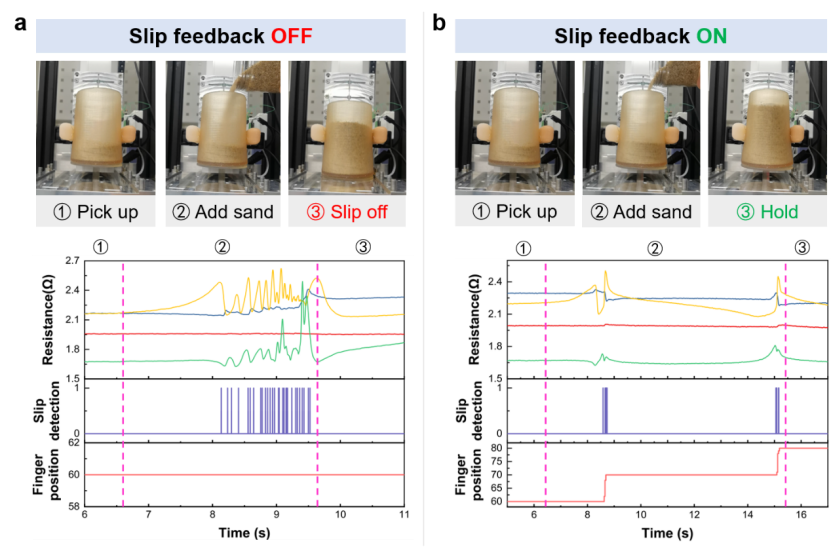
图9 自适应抓取具有移动趋势的易变形物体
总结
本文在仿生触觉手指上集成两个微软管传感器作为仿生指纹,实现了简单有效的初始滑移检测。结合实验与仿真,本文研究了初始滑移的细微动力学过程,降低了构建初始滑移检测系统的门槛。后续工作可以在仿生手指表面布置多个微软管传感器,以提高本方法的空间分辨率,实现滑移方向的准确判断。




